The Raptors team from the Lodz University of Technology took third place in World Robot Summit 2021. Three years earlier, it was second. The team operates at the university as part of the SkaNeR Robotics Student Research Group. In addition to improving the Mars rover, it also works on flying robots.
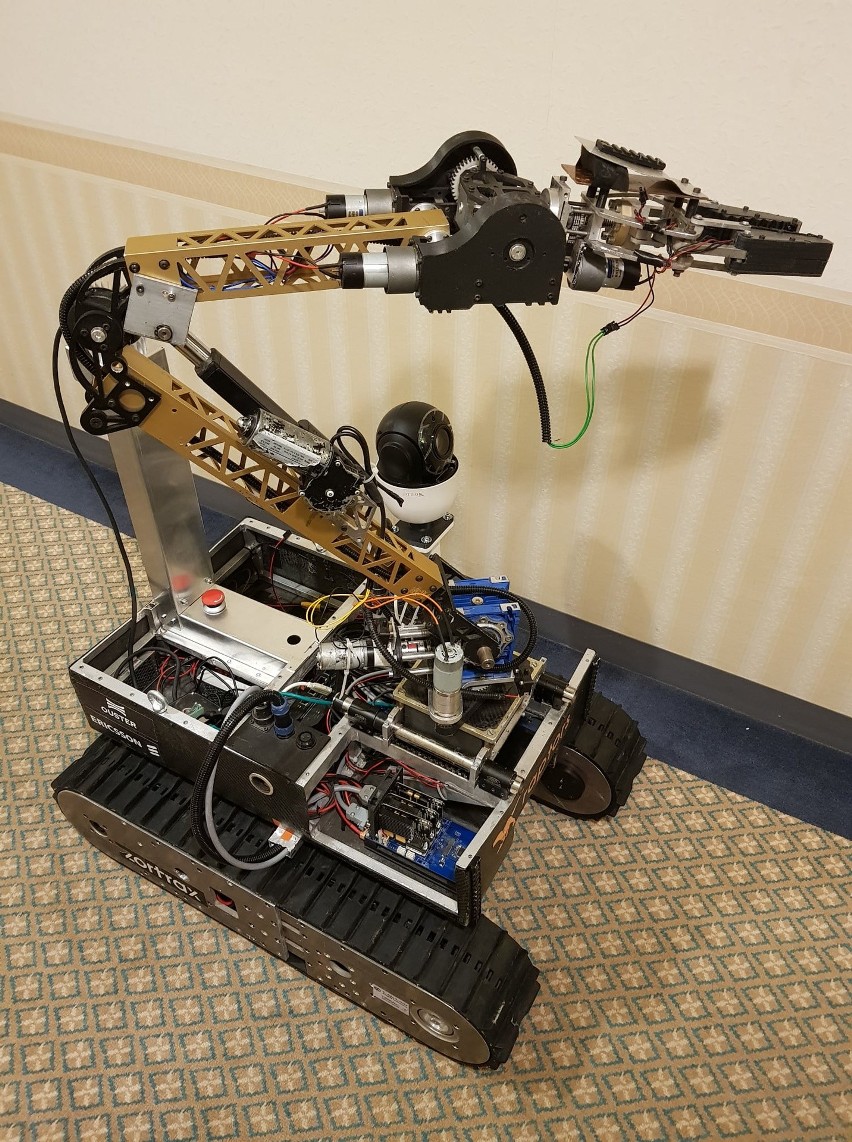
In both cases, the Polish team took part in the category of rescue robots used in the event of industrial plant disasters, They presented the famous and award-winning Mars rover of its production. It took first place in 2016. And second in 2018 in the international competition of Mars rovers European Rover Challenge, defeating over 30 teams.
World Robot Summit formula
The World Robot Summit finals are traditionally held as part of the World Robot Expo exhibition in four categories of robots:
- industrial,
- service,
- rescue,
- entertainment (Junior).
Top 10 teams from the qualifying round taking part in each of them. The second edition of the exhibition was supposed to take place in 2020. Due to the pandemic, it was moved to October 2021.
It is no coincidence that both events take place in Japanese Fukushima. Ten years ago there was a leak of radioactive substances from the nuclear power plant. It was caused by the earthquake and tsunami. As a result of the disaster, 18,000 people were killed. The threat, however, does not cease. In February 2021, due to another earthquake, contaminated water leaked from the damaged power plant.
About Polish team
This year Polish students, although in a slightly rejuvenated team composition, brought to Fukushima three robots they had constructed. The Martian rover was accompanied by a drone and a small robot called Turtle. In the finals, the Polish team competed against six teams from Japan and one each from the USA, Germany and Austria. In the end, only two Japanese teams were ahead of them.
What are these competitions about? The robots led by the students inspected a designated factory. It means looking for pressure gauges and reading indications from them and turning off some valves accordingly. Their robots also had to find people playing injured in an industrial accident.
“To speed up the execution of individual tasks, our robots were sent to different directions in the arena of operations. Each of them had different functions, so they complemented each other well during the mission. The task of our unmanned aerial vehicle was to locate infrastructure damage. Its definite advantage was mobility, allowing us to quickly get to places inaccessible to the rover. We also used it in the task of finding injured people during a simulated plant failure,” the students said. “The Turtle was used to inspect and map the ventilation duct located on the upper floors of the plant. The rover was on tracks that made it easier to navigate in tight industrial spaces and traverse damaged infrastructure.”
Autonomous functions preferred
The competition tasks scored primarily the robots’ autonomous functions, so students paid the most attention to their software in the last moments before the start. Each team had an inspection and rescue task scenario, but different than in the qualifying rounds. This year the competition itself was at a much higher technological level than before, so it was incomparably more difficult to achieve success. Not surprisingly, the whole trip turned out to be very mentally and physically exhausting. The team spent the first two weeks in quarantine, polishing their algorithms at that time. Immediately after its completion, due to the limitations related to the pandemic, they had to pack up the equipment and go to the airport as soon as possible.
Read more about student’s team in the finals of the MBZIRC robotic competition here.